◆ main()
| int main | ( | int | iargc, |
| char * | argv[] | ||
| ) |
Definition at line 87 of file lsqexample.cc.
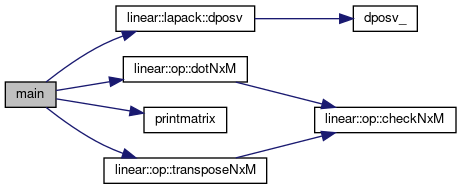
References linear::op::dotNxM(), linear::lapack::dposv(), printmatrix(), TF_LSQEXAMPLE_CC_VERSION, and linear::op::transposeNxM().
TDmatrix transposeNxM(const TDmatrix::Tcoc &A)
calculate transpose of NxM matrix.
Definition: transpose.cc:44
TDmatrix dotNxM(const TDmatrix::Tcoc &A, const TDmatrix::Tcoc &B)
dot product for NxM matrices.
Definition: dot.cc:45
void dposv(char UPLO, TDmatrix &A, TDmatrix &B, int &INFO, const bool &debug)
Compute the solution to a real system of linear equations A * X = B.
Definition: dposv_if.cc:87
Here is the call graph for this function: